Rezervni dijelovi klipnjača za utovarivač na kotačima za utovarivača točkaša XCMG Liugong

Klipnjača
Budući da postoji mnogo vrsta rezervnih dijelova, ne možemo ih sve prikazati na web stranici. Slobodno nas kontaktirajte za određene.
Prednost
1. Za vas isporučujemo originalne i postmarket proizvode
2. Od proizvođača do kupca direktno, štedeći vaše troškove
3. Stabilna zaliha za normalne dijelove
4. U roku isporuke, s konkurentnim troškovima dostave
5. Profesionalno i na vrijeme nakon usluge
Pakovanje
Kartonske kutije, ili po želji klijenata.
opis
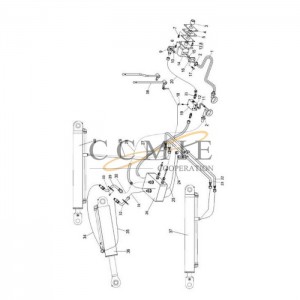
Funkcija klipnjače je da poveže klip i radilicu, tako da povratno linearno kretanje klipa postaje rotaciono kretanje radilice prema izlaznoj snazi.
Tijelo klipnjače se sastoji od tri dijela, dio koji je povezan s klipom naziva se mali kraj klipnjače; dio spojen sa radilicom naziva se veliki kraj klipnjače, a šipka koja spaja mali kraj i veliki kraj zove se osovina klipnjače. Mala glava klipnjače je uglavnom kružna prstenasta struktura tankih zidova. Kako bi se smanjilo habanje između klipnog klipa i klipnog klipa, u mali otvor glave utiskuje se brončana čaura tankih zidova. Izbušite ili izglodajte žljebove na maloj glavi i čahuri kako bi prskano ulje ušlo u spojnu površinu čaure za podmazivanje i klipnog klipa. Osovina klipnjače je dugačka šipka, a sila je takođe velika u radu. Da bi se spriječilo njegovo savijanje i deformacija, osovina mora imati dovoljnu krutost.
Prema tome da li je relativno kretanje između komponenti ravno ili prostorno kretanje, mehanizam povezivanja se može podijeliti na mehanizam za ravan i mehanizam za prostorno povezivanje. Mehanizam ravne veze je uobičajen mehanizam prijenosa. To znači da su sve krute komponente povezane niskim parovima, pa se naziva i mehanizam niskog para. Mehanizam ravne veze se široko koristi u raznim mašinama, instrumentima i kontrolnim uređajima. Kao što su klipni motori, pumpe i vazdušni kompresori, kao i rende, mašine za prorezivanje, bageri, utovarivači, čeljusne drobilice, pokretne trake, mašine za štampanje, tekstilne mašine itd., glavni mehanizmi su mehanizmi ravnog povezivanja. U mehanizmu povezivanja, ako se komponente ne kreću u istoj ravni ili paralelno jedna s drugom, mehanizam se naziva prostorni mehanizam. [3] Prema broju komponenti u mehanizmu, dijeli se na mehanizam sa četiri šipke, mehanizam sa pet šipki, mehanizam sa šest šipki, itd. Generalno, mehanizmi sa pet šipki i više od pet šipki se nazivaju višestruki - bar mehanizmi. Kada je stepen slobode mehanizma veze 1, to se naziva mehanizmom veze sa jednim stepenom slobode; kada je stepen slobode veći od 1, to se naziva mehanizam višestruke slobode veze.
Prema tome da li je kinematički lanac koji formira mehanizam za povezivanje otvoreni lanac ili zatvoreni lanac, odgovarajući mehanizam povezivanja se također može podijeliti na mehanizam povezivanja otvorenog lanca (manipulator je obično prostorni otvoreni lančani mehanizam povezivanja u kojem je kinematski par rotirajući par ili pokretni par) i mehanizam za povezivanje zatvorenog lanca. Broj komponenti jednog mehanizma za ravnu vezu zatvorene petlje je najmanje 4, tako da je najjednostavniji planarni mehanizam sa zatvorenim lancem mehanizam sa četiri poluge, a drugi mehanizmi sa više karika sa zatvorenim lancem nisu ništa drugo do proširenje grupa štapova na svojoj osnovi; jedna zatvorena petlja Broj komponenti mehanizma prostornog povezivanja je najmanje 3, tako da tri komponente mogu formirati prostorni mehanizam sa tri poluge.
Komponente mehanizma veze imaju različite oblike kretanja, kao što su rotacija, zamah, kretanje i složeno kretanje u ravni ili prostoru, koji se mogu koristiti za realizaciju poznatih zakona kretanja i poznatih putanja.
Prednosti
(1) Nizak par: površinski kontakt, velika nosivost, lako se podmazuje, nije lako nositi, jednostavan oblik, laka obrada, lako postići visoku točnost proizvodnje.
(2) Promjenom relativne dužine štapa, zakon kretanja sljedbenika je drugačiji.
(3) Kontakt između dvije komponente održava se vlastitim geometrijskim zatvaranjem, za razliku od zupčastih mehanizama koji ponekad moraju koristiti opruge i druge zatvarače za održavanje kontakta.
(4) Kriva klipnjače je bogata, što može zadovoljiti različite zahtjeve.
Nedostaci
(1) Postoji mnogo komponenti i parova pokreta, velika kumulativna greška, niska tačnost kretanja i niska efikasnost.
(2) Generiše se dinamičko opterećenje (inercijalna sila) i nije lako balansirati i nije pogodno za velike brzine.
(3) Dizajn je složen i teško je postići precizne putanje.
Stoga se mehanizam ravanskog povezivanja široko koristi u raznim mašinama, instrumentima i elektromehaničkim proizvodima. Sa razvojem metoda projektovanja mehanizama veze, popularnom primenom elektronskih računara i razvojem odgovarajućeg softvera za projektovanje, brzina projektovanja i preciznost dizajna mehanizama veze su znatno poboljšane, a uz ispunjavanje kinematičkih zahteva, takođe se može smatrati da dinamiku. Konkretno, uvođenje mikroelektronske tehnologije i tehnologije automatskog upravljanja, te usvajanje mehanizma povezivanja sa više stupnjeva slobode uvelike pojednostavljuju strukturu i dizajn mehanizma povezivanja i imaju širi spektar primjena.
Naše-skladište1

Spakujte i otpremite

- Aerial Boom Lift
- Kina kiper kamion
- Cold Recycler
- Cone Crusher Liner
- Bočni podizač kontejnera
- Dadi Buldožer dio
- Dodatak za čišćenje viličara
- Hbxg Dijelovi buldožera
- Howo Motor Parts
- Hidraulična pumpa Hyundai bagera
- Komatsu Buldožer dijelovi
- Zupčanik Komatsu bagera
- Hidraulična pumpa za bager Komatsu Pc300-7
- Dijelovi buldožera Liugong
- Sany rezervni dijelovi za pumpe za beton
- Sany rezervni dijelovi za bagere
- Shacman dijelovi motora
- Shantui buldožer vratilo kvačila
- Shantui Buldožer spojna osovina Pin
- Shantui Buldozer Control Fleksibilna osovina
- Shantui Buldožer Fleksibilna osovina
- Komplet za popravak cilindra za podizanje buldožera Shantui
- Shantui Buldožer dijelovi
- Shantui Buldožer Reel Shaft
- Shantui buldožer vratilo rikverca
- Shantui Buldozer rezervni dijelovi
- Pogonska osovina vitla Shantui Buldožera
- Shantui Dozer Bolt
- Shantui Dozer Prednji Idler
- Shantui komplet za popravak nagibnog cilindra buldožera
- Shantui Sd16 Bevel Gear
- Shantui Sd16 Kočna obloga
- Sklop vrata Shantui Sd16
- Shantui Sd16 O-prsten
- Shantui Sd16 Tračni valjak
- Shantui Sd22 Bearing Sleeve
- Frikcioni disk Shantui Sd22
- Shantui Sd32 Tračni valjak
- Dijelovi motora Sinotruk
- Šlep kamion
- Xcmg dijelovi buldožera
- Xcmg Buldozer rezervni dijelovi
- Xcmg hidraulična brava
- Xcmg Transmission
- Yuchai dijelovi motora
Kategorije proizvoda
-
11292833 brava sklop za bager rezervni dijelovi
-

171-51-27000 Poklopac (za škarifikator) Shantui SD32...
-
803081782 višesmjerni ventil XCMG WZ30-25 rovokopač ...
-

8053G0814 Washer 10 XCMG LW600KN utovarivač na kotačima p...
-

16Y-18-00019 Lijeva vanjska školjka
-

P10Y-80-00005V010 Kutna oštrica noža za suhu zemlju ...